FPV uçuşları esnasında gitmek istediğiniz mesafe uzaklaştıkça daha komple anten sistemleri kullanmak gerekiyor. Yaygın olarak kullanılan patch antenler belli bir açı dahilinde çektiği için uzaklaşan modeli takip edebilmek için anten tracker denilen yönlenen anten sistemleri şart oluyor.
Satın aldığım Eagle tree komple set içerisinde bulunan yer istasyonunu kullanarak diverstiy ve anten tracking yapmak istiyorum. Readymade sitesinde baktığımda anten tracker için hazırlanmış olan ve sadece kontraplaktan ve iki plastik dişliden oluşan pan tilt mekanizmalı sisteme 90$ + kargo ücret istiyorlar.
Bu fiyat bana çok abartılı geldiği için oturup kendi pan tilt sistemimi kendim yapmaya karar verdim. Orjinal ürünün resimlerinden bakarak kendi pan tilt mekanizmamı yaptım ve burada yapmak isteyen arkadaşlara fikir olması açısından paylaşmak istiyorum.
Orjinal ürünün resimleri





Resimlerden bakarak kabaca çıkardığım ölçüler:

Bu ölçüler ile kontraplak üzerinden ana gövdeyi oluşturan parçaları kestim. Bu sistemde belkide bulmakta en fazla zorluk çekeceğiniz şey 1:2 oranında iki tane dişli olacaktır diye düşünüyorum. Çünkü plastik dişliler eğer dişleri çok kalın ve geniş olmazsa kolayca sıyırabiliyor ama orjinal ürünün resimlerindeki gibi kalın ve geniş dişli biri büyük diğeri küçük iki dişli bulabilirseniz en zor kısmı geçmiş olursunuz.
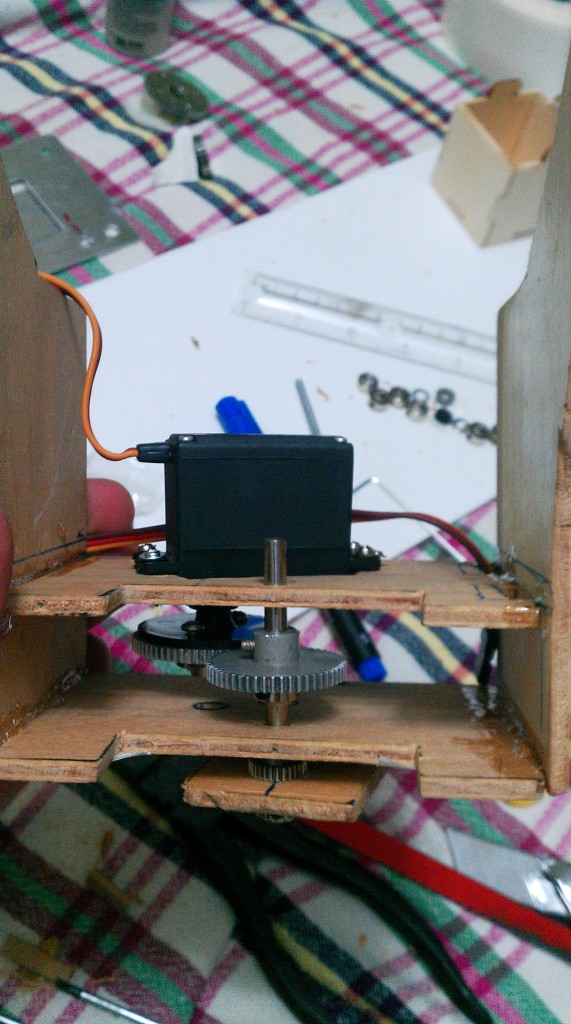
Benim dişlilerim metal. Bu dişlileri gerçek uçaklar üzerinde kullanılan ve kal edilmiş olan eski görüntü alma sistemlerinden bulup söktüm. Büyük dişliyi matkapla delip servonun yuvarlak plastik kafasına merkezleri tam çakışacak şekilde vidaladım.



Servo kafasına takılan dişlinin diğer dişliden en az 2 kat büyük olması lazım ki servo yaklaşık 90 derece döndüğü için mekanizma 180 derece dönebilsin. Benim bulduğum dişli tam 2 kat olmadığından şu an yaklaşıl 160 derece pan yapıyor ama 2 katı yakalayacak dişliler de bulurum bulunca düzelteceğim.
Daha sonra 8-10 cm uzunluğunda metrik 4 veya 5 lik bir vida, uygun somun ve pullar ile mekanizmanın üzerinde döneceği mil yapılıyor. Ana gövdenin tabanına ve ikinci katına aynı hizaya gelecek şekilde pimin içinden geçeceği delik deliniyor. Ayrıca tripod aparatının gireceği ve sabit olacak küçük bir parça kontraplak da deliniyor ve vida bu parçaya somunla sabitleniyor ki sistemimizin bu parçası sabit olacak ve metrik 6 somun ile tripoda sabitlenecek.


Daha sonra mile küçük dişliyi ana gövde tabanının üst kısmında mil üzerine sabitliyoruz. Benim dişlilerim yandan alyen ile sabitlenebiliyor. Plastik dişlileri vidaya döndürerek geçirip altına üstüne somun atıp sabitleyebilirsiniz. Sonra Gövde yan duvarları ile alt taban hizalanarak yapıştırılıyor.
Büyük dişliyi taşıyan servo baş aşağı şekilde gövde üst katına vidalanıyor. Bu işlemden önce dişlilerinizin dişleri birbirine geçecek şekilde servonun yerini işaretleyip üst tabakayı servo girecek şekilde kesmelisiniz. Servoyu monte ettikten sonra tekrar üst katmanı milden geçirip dişlilerin düzgün dönüp dönmediğini kontrol ettikten sonra üst katmanı da hizalayarak yapıştırıyoruz.






Bu aşamada pan sistemimiz tamamlanmış oldu. Şimdi nispeten daha kolay yapılan tilt kısmını yapalım.
Yan duvarlardan sol taraftakine yine servonun küçük yuvarlak kafasını vidaladım. Daha sonra patch antenin sabitleneceği ve servoyu monteleyeceğimiz tilt yüzeyi için dakota denen ve elimin altında bulunan malzemeden 8(genişlik)cmx14cm(yükseklik)x4cm(kalınlık) ölçülerinde bir dikdörtgenler prizması yaptım ve sevonun kafa dişlisi sol kenarı tam ortalayacak şekilde servoyu bu prizmanın sol tarafına sabitledim. Diğer gövde yan duvarına da metrik 4 bir vida soktum ve bu vidanın ucunı da prizmanın diğer tarafına soktum ve bu şekilde tilt prizması kendi ekseninde rahatça döner hale geldi.





Biraz süsleme ve diversity için ikinci alıcının ve pilin monte edileceği kısımda eklendikten sonra işe yarar birşeye benzedi gibi. Diğer tarafa da groun station için bir hazne yapılacak.


Bu da yeni dişliler ile 350 derece pan yapabilen tracker'ın test videosu. Sanırım kullandığım HXT standart servolar biraz zayıf kalmış. Çok hızlı hareketlerde ufak bir salınım oluyor ama şu an için sıkıntı olmaz çünkü genelde bu derecede hızlı harekete gerek kalmıyor uçak havadayken

Hiç yorum yok:
Yorum Gönder