Bugün 2012 yılının son uçuşunu yaptım. Uzun zamandır yeni mesafe denemesi yapmamıştım. 8715 metre mesafe ile kendi rekorumu yenilemiş oldum ve Malatya ekibinde de şu an en uzak mesafe bu oldu. 10.000 metreyi hedeflemiştim ancak dönüşte pil yetmez endişesiyle 1233 metre irtifa ve 8715 metre mesafede 3300 mAH ile dönüş yaptım. Dönüşte yaklaşık 500mAH harcayarak rahatça geldim. Aslında 10.000'i zorlayabilirmişim. Bu da bir tecrübe sonuçta. Bir sonraki denemede 10bin üzerini deneyeceğim. Bu mesafenin üzerinde artık uçağın aerodinamik verimliliği ve 5000mah'den büyük pil kullanma zorunluluğu ortaya çıkacak gibi.
Rota:
27 Aralık 2012 tarihinde Koray Yıldız ile birlikte İnönü Üniversitesi Model Uçak Pistinden kalkarak yaptığımız kol uçuşu çalışmalarından kesitler... Model uçak ile kolda durmak gerçekten zor :)
Yavaş yavaş birlikte uçmaya alışıyoruz. İkinci sortide yaklaşık 7km mesafe ile uzun mesafe denemesi de yaptık.
Topladığım hexa ile yaptığım ilk havadan video çekimi denemesi. Kayıt Gopro 2 ile alındı. Hexanın gopro ve 4400 mah 4s 35c lipo ile toplam kalkış ağırlığı 2350 gr. Toplam statik thrust ise 800grx6=4800 gr. Uçuş süresi 12 dk.
Hexa Video Deneme-1
İkinci denemede ise Bursa Mustafakemalpaşa Masalkent Mavi Masal Anaokulunu çektik. Bu videoda biraz daha stabil görüntü yakaladım ama daha kaliteli çekimler yapabilmek için NAZA +GPS kontrol kartını almam gerekiyor :)
Multikopter (Çok rotorlu) olarak adlandırılan hava araçları son dönemde oldukça yaygınlaşmaya başladı. Özellikle havadan video ve fotoğraf çekim işlerinde daha sık kullanılan bu araçlar hemen hemen her yerden kalkış yapabildiği gibi aynı zamanda uçakların sahip olmadığı manevra kabiliyetine ve helilerin sahip olamadığı faydalı yük taşıma kapasitesine sahip. Taşıdıkları yüksek kalitede kayıt yapabilen kameralar ile bu araçlarla büyük tesislerin, kurumların havadan tanıtım videoları, dizi, sinema ve reklam filmlerinde çeşitli sahneler, sportif ve sosyal aktivitelere ilişkin görüntüler çekilebiliyor.
Genellikle 3-4-6-8 motorlu çeşitleri bulunan kopterler buna göre isimlendiriliyor. Ben ilk olarak deneme amaçlı bir 4-motorlu (Quadrocopter) topladım ve bununla biraz pilotajımı geliştirdikten sonra (çünkü uçaktan çok çok farklı bir uçuş mantığı var) daha fazla yük taşıyabilmek ve daha stabil bir uçuş elde edebilmek için quad'ı bozup bir 6-motorlu (hexacopter) topladım ve bu hexa üzerine taktığım GoPro Hero 2 kamera ile yaptığım iki adet havadan video çekimi videosunu da burada sizlerle paylaşıyorum.
Gördüğüm kadarıyla multikopterlerdeki en önemli bileşen kumandanızın alıcısından aldığı komutları yorumlayarak motorların devirlerini değiştirerek multiye manevra yaptıran kontrol kartı. Piyasada 15 dolardan başlayıp 2500 dolara kadar fiyata ulaşan çeşitli özelliklerde (GPS, barımetrik sensör, manyetik sensör, RTH vs.) kartlar mevcut. Tabii ki fiyat arttıkça multinin uçuş stabilitesi ve dolayısıyla yapılan çekimin kalitesi artıyor. Benim kullandığım kart 30 dolarlık fiyatıyla sıkça kullanılan ve fiyat performans oranı yüksek bir ürün olan ve sadece 3 eksen gyrosu ve acc'si bulunan HK KK2.0 kontrol kartı. Naza gibi daha ileri seviye bir donanımla çok daha başarılı bir sistem kurulabilir ancak GPS destekli naza fiyatı 450 dolar civarında :)
Malzemeler:
6x NTM Prop Drive 2830 750 KV 3-4s Motor
6x Turnigy Plush 30A ESC
2x 2200Mah 4s 35c Lipo
HK KK2.0 Kontrol Kartı v1.4
Alüminyum Kollar + Karbon Şase (quad)
Full Karbon Şase (hexa)
3 adet 10x4.5 CW, 3 adet 10x4.5 CCW prop
Skywalker 190mm FPV uçağı ile bugün bir uzun mesafe denemesi yaptım. 5035 metre ile şu ana kadarki ve Malatya FPV grubundaki en uzun mesafeli FPV uçuşu oldu. En ilginci ise video sisteminde herhangi bir güçlendirme kullanmadım. Bevrc 1.3ghz tx/rx ve stok 3dbi omni antenleri ile uçuşu gerçekleştirdim. Uçuşun ilk 10-15 dakikasında çevrede dolaştığım için pilin büyük bir bölümü burada harcandı. 5000 metreden geri dönüşe geçtiğimde toplam 2700mah harcanmıştı ve 5km'lik dönüş güzergahında sahip olduğum irtifayı sürate çevirerek sadece 400mah ile geri geldim. Kullandığım 4 hücreli 5000mah pil ile sanırım sakin bir günde 10km mesafe denenebilir. Bir noktadan sonra uzun mesafe uçuşlarında modelin aerodinamik limitleri ve pil kapasitesi belirleyici oluyor. Muhtemelen bir sonraki mesafe denemem 8km olacak.
FPV uçuşları esnasında gitmek istediğiniz mesafe uzaklaştıkça daha komple anten sistemleri kullanmak gerekiyor. Yaygın olarak kullanılan patch antenler belli bir açı dahilinde çektiği için uzaklaşan modeli takip edebilmek için anten tracker denilen yönlenen anten sistemleri şart oluyor.
Satın aldığım Eagle tree komple set içerisinde bulunan yer istasyonunu kullanarak diverstiy ve anten tracking yapmak istiyorum. Readymade sitesinde baktığımda anten tracker için hazırlanmış olan ve sadece kontraplaktan ve iki plastik dişliden oluşan pan tilt mekanizmalı sisteme 90$ + kargo ücret istiyorlar.
Bu fiyat bana çok abartılı geldiği için oturup kendi pan tilt sistemimi kendim yapmaya karar verdim. Orjinal ürünün resimlerinden bakarak kendi pan tilt mekanizmamı yaptım ve burada yapmak isteyen arkadaşlara fikir olması açısından paylaşmak istiyorum.
Orjinal ürünün resimleri
Resimlerden bakarak kabaca çıkardığım ölçüler:
Bu ölçüler ile kontraplak üzerinden ana gövdeyi oluşturan parçaları kestim. Bu sistemde belkide bulmakta en fazla zorluk çekeceğiniz şey 1:2 oranında iki tane dişli olacaktır diye düşünüyorum. Çünkü plastik dişliler eğer dişleri çok kalın ve geniş olmazsa kolayca sıyırabiliyor ama orjinal ürünün resimlerindeki gibi kalın ve geniş dişli biri büyük diğeri küçük iki dişli bulabilirseniz en zor kısmı geçmiş olursunuz.
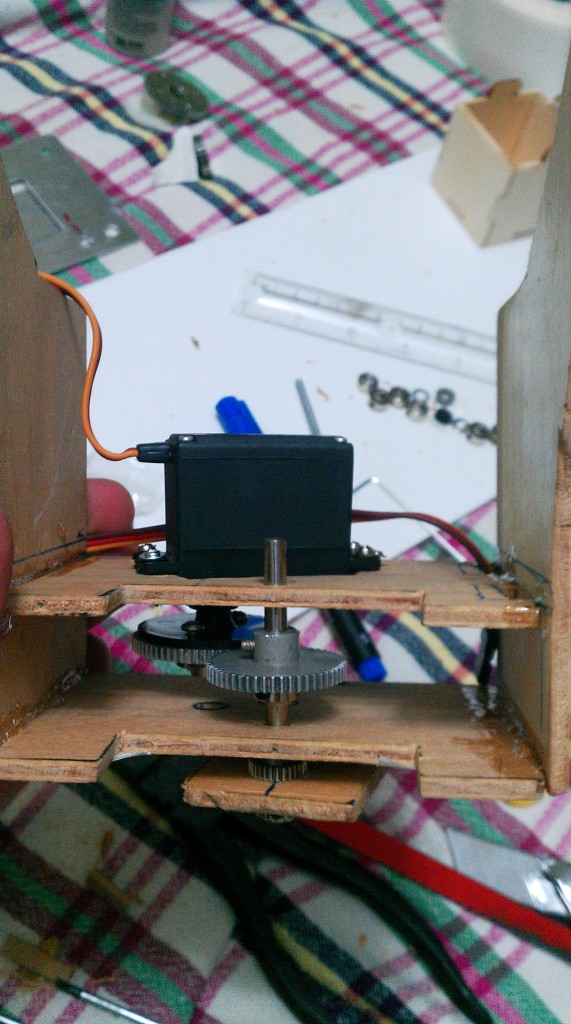
Benim dişlilerim metal. Bu dişlileri gerçek uçaklar üzerinde kullanılan ve kal edilmiş olan eski görüntü alma sistemlerinden bulup söktüm. Büyük dişliyi matkapla delip servonun yuvarlak plastik kafasına merkezleri tam çakışacak şekilde vidaladım.
Servo kafasına takılan dişlinin diğer dişliden en az 2 kat büyük olması lazım ki servo yaklaşık 90 derece döndüğü için mekanizma 180 derece dönebilsin. Benim bulduğum dişli tam 2 kat olmadığından şu an yaklaşıl 160 derece pan yapıyor ama 2 katı yakalayacak dişliler de bulurum bulunca düzelteceğim.
Daha sonra 8-10 cm uzunluğunda metrik 4 veya 5 lik bir vida, uygun somun ve pullar ile mekanizmanın üzerinde döneceği mil yapılıyor. Ana gövdenin tabanına ve ikinci katına aynı hizaya gelecek şekilde pimin içinden geçeceği delik deliniyor. Ayrıca tripod aparatının gireceği ve sabit olacak küçük bir parça kontraplak da deliniyor ve vida bu parçaya somunla sabitleniyor ki sistemimizin bu parçası sabit olacak ve metrik 6 somun ile tripoda sabitlenecek.
Daha sonra mile küçük dişliyi ana gövde tabanının üst kısmında mil üzerine sabitliyoruz. Benim dişlilerim yandan alyen ile sabitlenebiliyor. Plastik dişlileri vidaya döndürerek geçirip altına üstüne somun atıp sabitleyebilirsiniz. Sonra Gövde yan duvarları ile alt taban hizalanarak yapıştırılıyor.
Büyük dişliyi taşıyan servo baş aşağı şekilde gövde üst katına vidalanıyor. Bu işlemden önce dişlilerinizin dişleri birbirine geçecek şekilde servonun yerini işaretleyip üst tabakayı servo girecek şekilde kesmelisiniz. Servoyu monte ettikten sonra tekrar üst katmanı milden geçirip dişlilerin düzgün dönüp dönmediğini kontrol ettikten sonra üst katmanı da hizalayarak yapıştırıyoruz.
Bu aşamada pan sistemimiz tamamlanmış oldu. Şimdi nispeten daha kolay yapılan tilt kısmını yapalım.
Yan duvarlardan sol taraftakine yine servonun küçük yuvarlak kafasını vidaladım. Daha sonra patch antenin sabitleneceği ve servoyu monteleyeceğimiz tilt yüzeyi için dakota denen ve elimin altında bulunan malzemeden 8(genişlik)cmx14cm(yükseklik)x4cm(kalınlık) ölçülerinde bir dikdörtgenler prizması yaptım ve sevonun kafa dişlisi sol kenarı tam ortalayacak şekilde servoyu bu prizmanın sol tarafına sabitledim. Diğer gövde yan duvarına da metrik 4 bir vida soktum ve bu vidanın ucunı da prizmanın diğer tarafına soktum ve bu şekilde tilt prizması kendi ekseninde rahatça döner hale geldi.
Biraz süsleme ve diversity için ikinci alıcının ve pilin monte edileceği kısımda eklendikten sonra işe yarar birşeye benzedi gibi. Diğer tarafa da groun station için bir hazne yapılacak.
Bu da yeni dişliler ile 350 derece pan yapabilen tracker'ın test videosu. Sanırım kullandığım HXT standart servolar biraz zayıf kalmış. Çok hızlı hareketlerde ufak bir salınım oluyor ama şu an için sıkıntı olmaz çünkü genelde bu derecede hızlı harekete gerek kalmıyor uçak havadayken
25.08.12 Cumartesi günü biraz daha farklı bir manzara çekebilmek amacıyla İnönü Üniversitesinin alt tarafındaki atletizm pistinden Skywalker FPV 190 ile havalandım. Uçuş kaydını her zamanki gibi yine Full HD GoPro Hero 2 ile gerçekleştirdim. NOVA eve dönüş özellikli otopilot sistemi akşam üstü havanın hafif kararmasından ötürü çok verimli çalışmayınca riske girmeyip 3.2 km mesafede Bulgurlu Köyü ile Göller Köyü arasında bir mesafede tekrar geri döndük. Eagle tree otopilot sistemi gelince daha uzun mesafeleri deneyeceğiz. Uçuşta max irtifa 980 metre max sürat 72km/saat max mesafe 3235metre oldu. Toplam katedilen mesafe ise yaklaşık 13-14 bin metredir. Toplam Uçuş Süresi 25 dakikadır.
Ancak akşam güneşin batışı ile ufuktaki Karakaya Baraj Gölü manzarası süper olmuş :) 720p izlemenizi tavsiye ederim.
Saygılar,
Onur...
18 Ağustos 2012 Cumartesi günü Metin Hocam ve Hakan abi ile birlikte yaptığımız Octocopter, quadcopter ve Skywalker FPV buluşma videosu. Videolar her bir hava aracındaki GoPro Hero 2'ler ile çekilmiştir.
FPV uçuşlarım için topladığım ve hemen hemen tüm modelciler tarafından gerek stabil uçuşu gerekse fazla yük taşıma kapasitesi dolayısıyla en beğenilen FPV uçağı olan Skywalker 190'lığın Malatya İnönü Üniversitesi model uçak pistindeki uçuş videolarını sizinle paylaşıyorum.
Uçağın üzerinde ekipman olarak
MOTOR: bevrc'de satılan ve en çok önerilen 980kv'lık motor,
PERVANE: 9x6 APC E pervane,
ESC: Turnigy Plush 40A,
BEC: Turnigy 5A BEC devresi,
SERVO: 4 EA Emax Metal Dişli Servo,
UÇUŞ PİLİ: Zippy 5000mAH 4S 20C Lipo,
ViDEO PiLi: Zippy 1300mAH 3S 20C Lipo,
OSD: NOVA RTH OSD (bevrc),
BOARD CAM: Sony 600 TVL D-WDR kamera,
HD CAM: GoPro Hero 2 Motorsport Edition (1080px 30FPS)
TX/RX: Bevrc 1.3gHz 800mW video TX/RX + Low pass filter
RC rx/tx Futaba 7c 2.4 ile birlikte 433Mhz EzUHF LRS
mevcut.
Bu konfigürasyon ile yaklaşık 40 dakika havada kalabiliyor ve Kumanda sistemi 40km'ye kadar çalışıyor. Video sistemi için anten takip sistemi yapımım devam ediyor. Şimdilik 4km civarında video sinyali alabiliyorum. Anten takip ve patch anten ikilisi ile 10km üzer hedefliyorum... NOVA OSD'nin eve dönüş (RTH) modu çok güven vermediği için şimdilik 4km civarı uçuşlar yapıyorum. Yeni Eagle Tree sistem ile 10km üzeri uçuş videolarının sorun olmayacağı kanaatindeyim. Sistem gelince ayrıca tanıtımını ve deneme videolarını ekleyeceğim.
Saygılar,
Onur...
Sirius biraz küçük kaldığı için FPV camiasının en popüler uçağı skywalker'ın 190cm'lik versiyonunu topladım. Gerçekten de uçağın içi çok geniş ve yerleşim çok ferah. Pili ağırlık merkezini ayarlayabilecek şekilde istediğiniz gibi öne arkaya kaydırabiliyorsunuz. Bu uçağı genellikle elden atıp gövde üzerine indiriyorlar ancak bu şekilde yalnız başına uçuş yapmak zor olduğundan ve genelde pistte veya beton zeminde iniş kalkış yaptığımdan skywalker'a iniş takımı modifiyesi yaptım. Arka tekeri de rudder'dan tahrikli hale getirdim ve yerde rule yaptırmak çok rahat hale geldi. Ayrıca bu sayede gözlükle iniş kalkış çok daha rahat ve keyifli oluyor. Gördüğüm en negatif olay ise kanatçıkların biraz küçük olması ve yatışların bu yüzden sağır olması. Ancak süzülüş ve havada kalış süresi gayet iyi. Yaptığım 2-3 uçuşta henüz video kaydı yapmadım. Sipariş verdiğim gopro hero 2'nin gelmesini bekliyorum :)
Ayrıca EzUHF kumanda modifiyesi ve patch anten ile şu an 5-6 km'lik daha sonra da 10km civarı uçuş planlarım var. Gelişmeleri paylaşmaya devam edeceğim. Tüm modelci dostlara kırımsız uçuşlar...